Development of a Field Navigation Map
Field Activity #3 part 1
The start of our third field activity deals with learning our pace count, determining what all to place on a map, and the creation of two maps for future parts of this field activity. By combining all three of these in a future part of our lab, we will be able to locate and navigate to waypoints on the maps we created and find them in the woods.
A pace count is a means of measuring distance over a period of time. By using the scale on our maps, we should be able to combine that with the knowledge of our pace count to complete the location of the way points. The way we determined what our pace count was was by stretching two tape measures out all the way. The tape measures were each 50 meters long, so we had a total of 100 meters. When walking to learn your pace, you want to count with only one foot. I used my right foot, so every time my right foot touched the ground I counted, 1, 2, 3, and so on. I recorded my pace count twice and each time it was 65 1/2 steps to cover the 100 meters. Now that I had my pace count it was time to create the two maps I would use them with.
Before I could create my maps, I first needed to look at the data that we would be using. When viewing the data the two major keys I took into factor when choosing was what was the coordinate system and what projection the data was in. The coordinate system for the first map was the NAD83 Wisconsin Transverse Mercator, with a Wisconsin Transverse Mercator for the projection. NAD83 is a highly used coordinate system in North America. The Transverse Mercator projection stems from the Mercator projection. This projection delivers a high accuracy within different zones less than a few degrees apart. Knowing that this coordinate system and projection will allow me to view my study area, I used the same projection on the second map and changed the coordinate system slightly. I used the NAD83 UTM Zone 15N coordinate system. This systems is smaller and would give a little better real world showing on the second map.
The data that was used to create the maps were provided from our professor. The data was from the Priory database that contained pictures, points, contour levels, and research boundaries. The first map I created I decided to use real time color imagery of our research area. Although it's hard to make out different types of trees in the wooded area, I am able to see different stands of vegetation along with fields, buildings, and water. This first map used the NAD83 Wisconsin Transverse Mercator coordinate system. Although this coordinate system is defined to this area, my second map uses a more defined coordinate system. Knowing that this wasn't enough by itself, I decided to overlay the research area with two foot contour lines. This would allow me to know if I am going up or down hill when in the field. I feel that having the contour lines on the map is the most important feature class to use. On the first map, I have also included the research boundary area with a red box outline, have the north arrow, and also have a scale bar. With know my pace count now, I can use the scale bar with a few conversions to know close to the area that I will be at. In figure 1 I have my map 1.
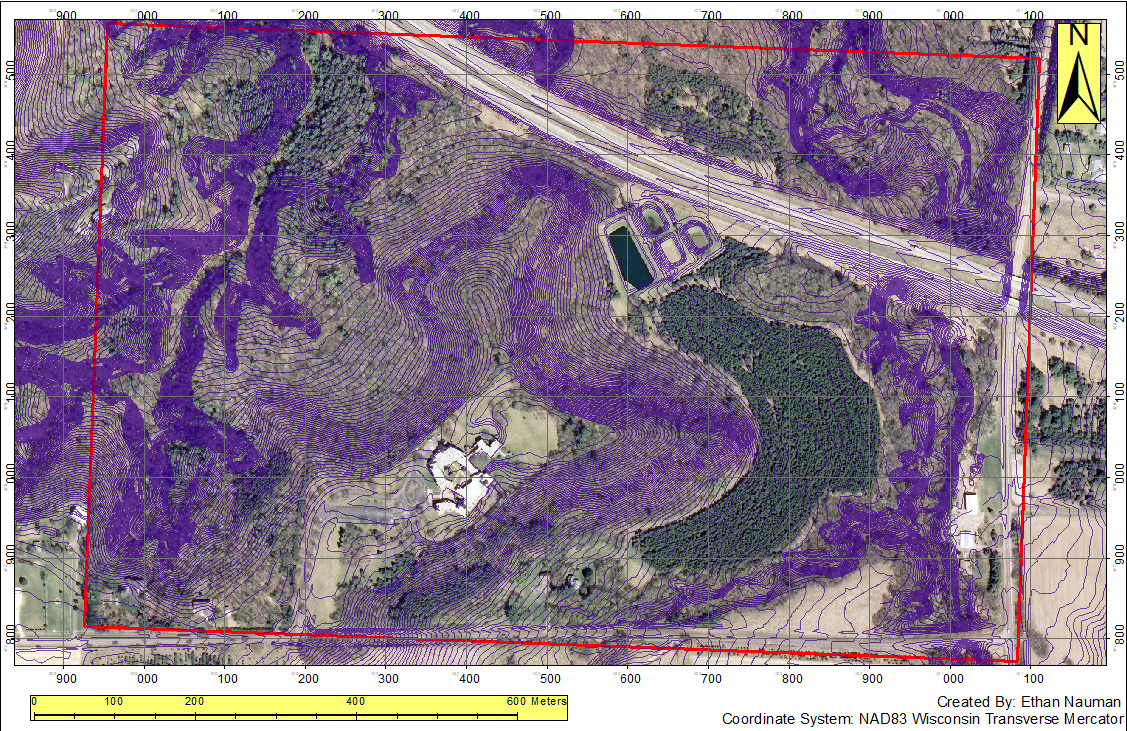 Figure 1
Figure 1
The second map I created was similar to the first map. I used black and white color imagery that used the NAD83 UTM Zone 15N coordinate system. This coordinate system is smaller and finer compared to the first maps coordinate system. Like in the first map, I also included the two foot contours allowing me to show elevation changes. I also included the scale bar, north arrow, and research boundary area again. With these two maps and my pace count, I should be able to locate the waypoints that we will use in a future part of this lab. Figure 2 shows my second map.
 Figure 2
Figure 2
Like I have stated before, this is only the first part to this field activity. With the creation of my two maps, along with my partners maps, and my pace count, I should be able to use these to locate the different way points in the future of this field activity. Currently not knowing what my partners has on his maps, I am curious to see what his looks like and to compare.